服務熱線
一、名詞介紹
 1.力觸覺技術
1.力觸覺技術
定義: 所謂的力觸覺技術開始是應用于軍事上的一種虛擬現實技術,它利用機械表現出的一種反作用力,將虛擬環境中的力的數據通過力反饋設備表現出來,可以讓用戶有一種身臨其境的感覺。
2.遙操作技術
指在相關機器人控制中把人類操作包含在控制回路中,任何的上層規劃和認知決定都是由人類用戶下達,而機器人本體只是負責相應的實體應用。當機器人處理復雜的感知和大量任務時,在快速做出決策和處理極端情況時,遙距操作遠遠優于智能編程。
3.虛擬現實技術
虛擬現實技術囊括計算機、電子信息、仿真技術,其基本實現方式是計算機模擬虛擬環境從而給人以環境沉浸感。隨著社會生產力和科學技術的不斷發展,各行各業對VR技術的需求日益旺盛。VR技術也取得了巨大進步,并逐步成為一個新的科學技術領域。
二、意義
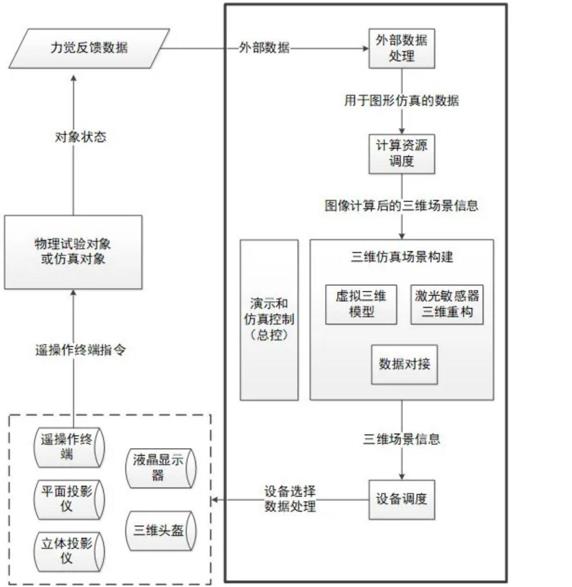
 在特定環境下,遠程操控系統加入力覺反饋能夠使操作者感受到真實的操縱感覺,實現力覺臨場感.實時把握被控對象運動狀態,及時對控制指令做出相應的調整.保證被控對象在遠程操控下準確可靠運行,很大程度上能夠降低人員操作失誤率,增加操作者操控的安全性,因此對基于力反饋的航空航天遠程操控系統的研究具有十分重要的現實意義。
在特定環境下,遠程操控系統加入力覺反饋能夠使操作者感受到真實的操縱感覺,實現力覺臨場感.實時把握被控對象運動狀態,及時對控制指令做出相應的調整.保證被控對象在遠程操控下準確可靠運行,很大程度上能夠降低人員操作失誤率,增加操作者操控的安全性,因此對基于力反饋的航空航天遠程操控系統的研究具有十分重要的現實意義。
通過仿真分析驗證控制方法的有效性,保證轉向系統力反饋的準確性為操作者提供可靠的感知信息,同時對數據通信、位置跟蹤等模塊進行功能測試,驗證各模塊程序設計的合理性.保證數據通信、位置跟蹤、數據顯示的準確性,實現遠程操控系統軟便件的協調與統一,最終實現系統準確的力覺反饋,增強對遠程機械臂控制的有效性滿足基于力反饋的遠程操控系統的既定要求。
基于在VR頭盔中雙目遠程立體成像的真實空間反饋體驗,通過三維可視化技術構建虛擬的機械臂與實驗目標,以及力反饋設備的力矩操作體驗,使遠程操控機械警如同使用自己的手臂去完成任務一樣清晰具象,操作過程更加精確可靠。通過三維全景仿真驗證系統,實驗者可以在立體環境中使用力反饋設備驅動機器人進行實驗操作,并可以完成模擬實物仿真實驗、虛擬仿真實驗、混合仿真實驗多和實驗狀態,為后續實操提供實驗依據。

1.遠程操控:在現實環境中實時控制一個遠端指令生成設備(機械手臂+手爪)對實物進行操作,同時感受遠端指令生成設備和環境的接觸力。
2.基于虛擬現實的培訓: 在虛擬現實環境中實時仿真和控制虛擬的遠端指令生成設備對虛擬物體進行操作。
3.基于混合現實的培訓: 在現實環境中實時控制一個遠端指令生成設備對虛擬物體進行操作,同時感受遠端指令生成設備和虛擬物體的接觸。
三、項目分析
根據用戶需求調研,結合項目背景分析,用戶主要實現實物仿真實驗、虛擬仿真實驗、混合仿真實驗三種應用模式。
其中,在多人協同任務時如創建的實驗任務為遠程實物仿真實驗模式,則所有接入用戶必須都為遠程實物仿真實驗;而空間虛擬仿真實驗、混合仿真實驗兩種模式可在多人協同任務時混合應用。

實物仿真實驗
基于在VR頭盔中雙目遠程立體成像的真實空間反饋體驗,以及力反饋設備的力矩操作體驗,使遠程操控機械臂如同使用自己的手臂去完成任務一樣清晰具象,操作過程更加精確可靠。
 虛擬仿真實驗
虛擬仿真實驗
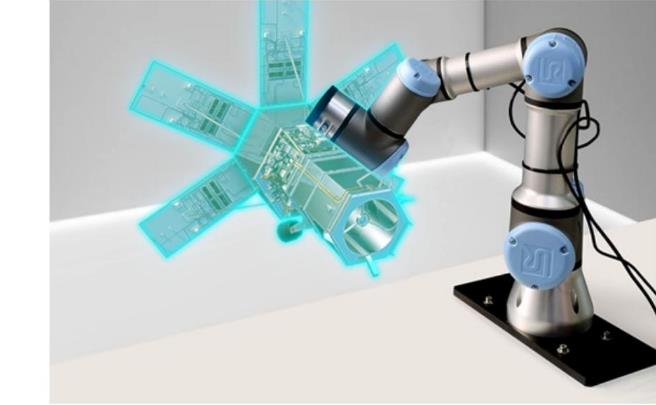
虛擬仿真實驗,通過三維可視化技術構建虛擬的機械臂與實驗目標并可將它們部署于依托真實的環境數據支撐的虛擬真是環境中,通過真實仿真數據驅動其運行,實現更加符合真實作業環境的仿真實驗。
虛擬仿真實驗模式,可支持現實中存在與不存在的各種機械手臂和實驗目標,在驗證機械臂對目標運動干涉時,不受地面實驗設備限制,可進行最接近真實的設備姿態變化。
將真實的設備 (機械臂)與虛擬的目標設備融匯在一個空間中,并進行接觸物理仿真計算,實現虛實融合的仿真實驗。
應用虛擬仿真技術,實現真實機械臂與虛擬目標物體無縫結合,使實驗室具備極大的實驗任務兼容性,并降低了實驗成本、減少實驗時間。
